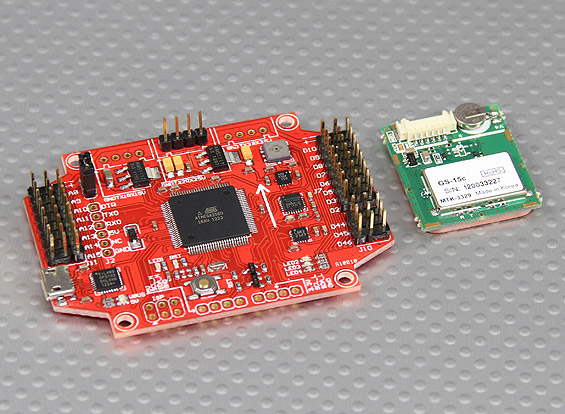
I recently purcashed HK multiwii pro.
If you want to change parameters you’ll need to changed them in code with arduino or in multi wii gui. Quite complicated for beginers.
Friend told me that this megapirate fw is awesome for this board. You basiclly use simple APM interface for editing multi wii board.
So I checked all tutorials on internet. And all were sooooo complicated. I spent 1,5 hour just to upload fw to board. But still I wasn’t able to connect.
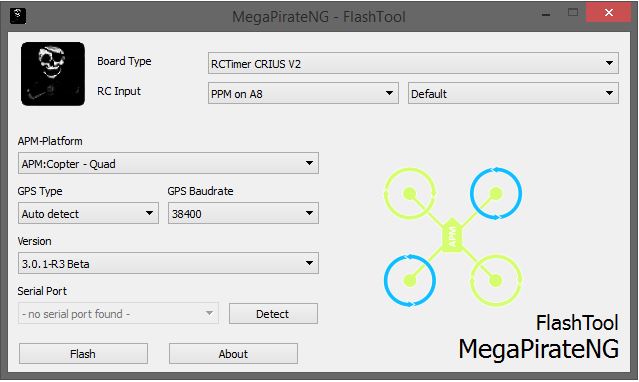
So I found that tool: Flash tool MegaPirateNG
You can upload MegaPirateNG in 5 minutes. Awesome tool.
Download it here: https://github.com/MegaPirateNG/FlashTool/releases/tag/1.0rc2
Then you just need to select board type, gps type… For HK board you need to have settings like this:

- Board type: hk red multii wii pro
- Rc input: i have 6 chanel hk receiver so i selected regular pwm and multiwii (if you’ll choose other you will have mixed throtle,jaw…
- Apm platform: I was building a quad, so I selected quad
- Gps type: you can leave autodetect, but with board came mtk gps
- Gps baudrate: I knew that gps baudrate was set to 115200 so I selected this speed. It is better 57600 (less percentage of error), but I had no time and gps works fine. Maybe I will change baudrate later. You must know which baudrate is setted on GPS. If you want to change it, you will need gps utility.
- Version: This was only one available, latest version
- Serial port: you can see it in device manager. You will need this usb drivers for board. http://www.ftdichip.com/Drivers/CDM/CDM20814_WHQL_Certified.zip
Flashing takes you about one minute. Its easy, simple and fast.
Then you download APM mission planer from here http://ardupilot.com/wp-content/plugins/download-monitor/download.php?id=82
Select com port and click connect: You should be able to connect to a board. Then go outside and check if gps is working and if receiver is configured properlly in mission planer.
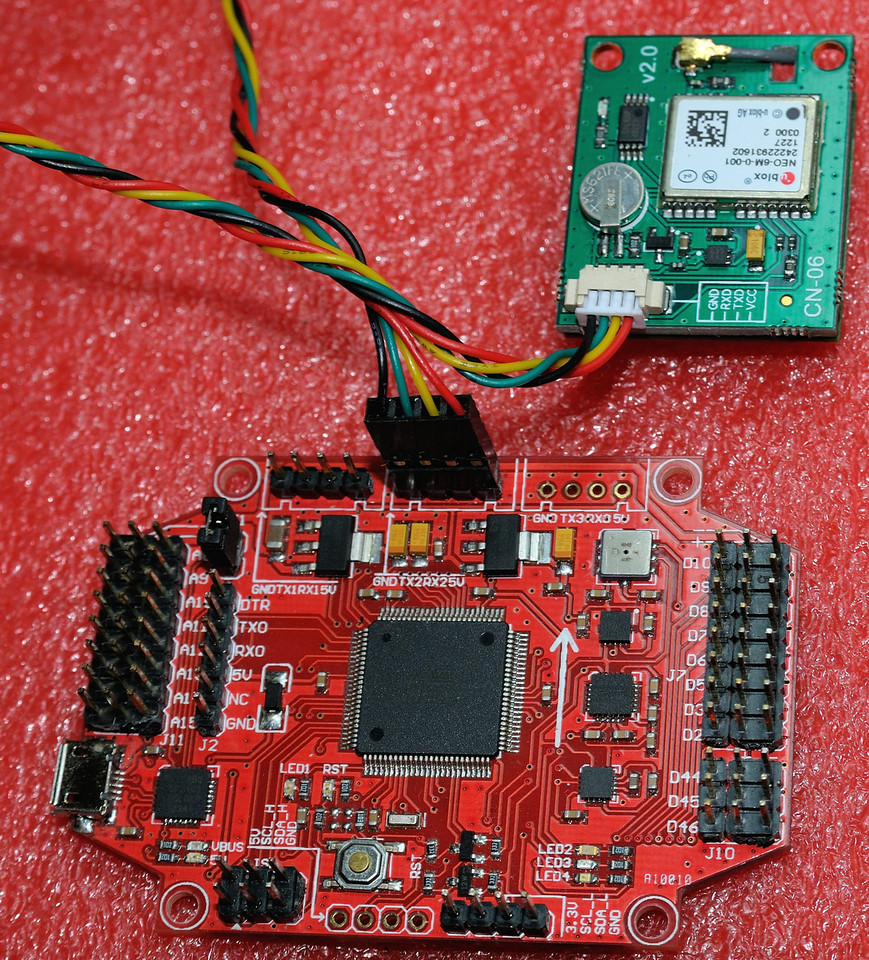
If gps is not working, then is possible that you didn’t connected properly. rx wire should go on tx on board and tx wire from gps receiver should go on rx on board. See pic bellow. If that doesn’t help, change baudrate and flash again.
All you need now is some fine tunning and to calibrate board. I will explain that in other posts.